Automazione di giochi di abilita'
Ovvero, esperimenti divertenti sul controllo real-time
La tesi consiste nel progetto e nella realizzazione di
uno o piu' sistemi di controllo real-time (a seconda
della complessita'), da sviluppare presso il laboratorio
di robotica della Facolta' di Ingegneria di Pavia.
Lo scopo e' quello di mettere in evidenza l'importanza di un
supporto real-time nel controllo del sistema e la dipendenza
delle prestazioni dai vincoli temporali imposti ai processi
applicativi.
I sistemi previsti sono elencati di seguito.
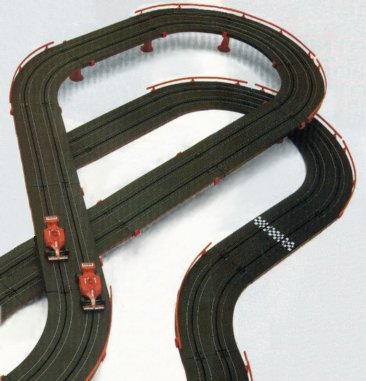 |
Corsa di macchine su pista
Si tratta di costruire un sistema di controllo in grado di
pilotare autonomamente una o due macchine da corsa su una
pista di tipo Polistil.
La posizione e la velocita' delle macchine vengono rilevate
mediante una telecamera oppure per mezzo di appositi sensori
ottici da posizionare sulla pista.
Il controllo deve essere in grado di pilotare la macchina
alla massima velocita' possibile in ogni punto della pista,
risolvendo al tempo stesso i casi di strettoia e di incrocio
fra le due corsie.
|
 |
Controllo di veicoli autonomi
Si tratta di sensorizzare e controllare una macchinina
telecomandata (modello commerciale, di tipo fuoristrada),
allo scopo di utilizzarla per l'esplorazione e il monitoraggio
di ambienti sconosciuti.
Il veicolo dovra' essere in grado di muoversi su terreni
non piani, evitando gli ostacoli e le situazioni di stallo.
Una telecamera e un sensore di prossimita' a ultrasuoni potranno
essere installati sul veicolo per monitorare l'ambiente esplorato
e controllare la traiettoria della macchina.
Nei limiti degli spazi disponibili in laboratorio, si potra'
ricostruire uno scenario simile a quello marziano, esplorato
dal robot Sojourner della sonda Pathfinder.
|
 |
Pendolo inverso
Si tratta controllare l'accelerazione di un carrellino
mobile su una guida rettilinea, in modo da mantenere
in equilibrio un'asticella imperniata su di esso.
Una volta realizzato il sistema di base, il controllo potra'
essere esteso in modo da sovraimporre al carrello delle
traiettorie desiderate, adattarsi a cambiamenti del sistema
(ad esempio variazioni della lunghezza dell'asta e della massa
del carrello), tollerare oscuramenti temporanei dei sensori
oppure fallimenti temporanei dell'algoritmo di controllo
(prevedendo, ad esempio, algoritmi di controllo secondari
da utilizzare in caso di problemi rilevati sull'algoritmo
primario).
|
 |
Labirinto magico
Si tratta di controllare le rotazioni della base del
labirinto, in modo da condurre una pallina al traguardo,
evitando le buche sul percorso. La traiettoria della
pallina viene rilevata mediante una telecamera posta
in alto rispetto al piano.
Una volta realizzato il controllo di base, il sistema puo'
essere esteso in modo da tollerare oscuramenti temporanei
della telecamera.
Un'altra variante puo' essere quella di far seguire alla
pallina delle traiettorie prefissate disegnate sulla
piattaforma mobile, imponendo un errore massimo desiderato.
|
 |
Tiro al bersaglio
Partendo da un sistema di movimentazione a due gradi di
liberta' rotazionali (gia' esistente in laboratorio), la
tesi consiste nello sviluppo di un sistema automatico di
tiro al bersaglio, basato su una pistola ad aria compressa.
L'obiettivo del sistema e' quello di centrare bersagli fissi
e mobili, e di auto calibrarsi in caso di variazioni sul
sistema di puntamento.
|
 |
Canestro mobile
Si tratta di costruire un sistema di movimentazione a
due gradi di liberta' in grado di trasportare un canestro,
allo scopo di catturare una pallina lanciata a caso
all'interno dell'area di raggiungibilita' del sistema.
La traiettoria della pallina viene rilevata e ricostruita
mediante un sistema di visione basato su una telecamera
fissa.
|
 |
Levitazione magnetica
Si tratta di costruire un sistema a levitazione magnetica
in grado di controllare la posizione di una pallina di ferro
all'interno dello spazio di azione.
La posizione della pallina di ferro puo' essere rilevata
mediante una telecamera oppure per mezzo di un array di
fotorilevatori.
|
 |
Flipper
Si tratta di controllare i pulsanti di un flipper
utilizzando l'informazione visiva fornita da una
telecamera posizionata sopra di esso.
Al fine di ottenere buone prestazioni, particolare attenzione
dovra' essere dedicata al processo di tracking della pallina,
e al processo di previsione della sua traiettoria.
|
 |
Robot portiere
Si tratta di controllare un carrello scorrevole su una guida
in modo da simulare un portiere che debba parare dei tiri in
porta. La posizione della palla viene rilevata mediante una
telecamera fissa sistemata dietro la porta.
Le attivita' principali del sistema riguardano essenzialmente
il tracking della palla, la previsione della sua traiettoria
e il controllo della posizione del portiere.
|